Categorias: Eletricistas iniciantes, Motores elétricos e sua aplicação
Número de visualizações: 8782
Comentários sobre o artigo: 0
Classificação do motor
Dependendo da finalidade, dos modos e condições operacionais esperados, do tipo de fonte de alimentação, etc., todos os motores elétricos podem ser classificados de acordo com vários parâmetros: pelo princípio de obtenção do momento de operação, pelo método de operação, pela natureza da corrente de alimentação, pelo método de controle de fase, por tipo de excitação, etc. Vamos considerar a classificação de motores elétricos em mais detalhes.

Ocorrência de torque
O torque nos motores elétricos pode ser obtido de uma de duas maneiras: pelo princípio da histerese magnética ou puramente magnetoelétrico. Motor de histerese recebe um torque através da histerese durante a reversão de magnetização de um rotor magneticamente sólido, enquanto motor magnetoelétrico torque é o resultado da interação dos pólos magnéticos explícitos do rotor e do estator.

Hoje, os motores magnetoelétricos constituem legitimamente a maior parte da abundância total de motores elétricos usados em tantos campos. Eles são divididos pela natureza da corrente de suprimento em:
-
Motores DC
-
Motores de corrente alternada
-
motores universais.
Ao contrário de um motor magnetoelétrico, a magnetização do rotor em relação aos seus eixos geométricos é permitida no motor de histerese, e esse recurso em particular não permite que as leis gerais da conversão magnetoelétrica sejam estendidas ao modo de operação síncrona do motor de histerese.
Assista - Dispositivo e princípio de ação do motor elétrico mais simples e Como fazer um motor elétrico simples em 10 minutos

Classificação do motor
Motores DC

Em um motor alimentado por corrente contínua, o próprio motor é responsável por alternar as fases. Isso significa que, embora uma corrente direta seja fornecida à máquina elétrica, no entanto, devido à ação dos mecanismos internos do dispositivo, o campo magnético acaba sendo capaz de manter o torque do rotor (como se uma corrente alternada atuasse no enrolamento do estator).

O dispositivo e a operação do motor CC: 1 - âncora, 2 - eixo, 3 - placas coletoras, 4 - escova, 5 - circuito magnético da armadura, 6 - circuito magnético do indutor, 7 - enrolamentos de campo, 8 - corpo do indutor, 9 - tampas laterais 10 ventiladores, 11 pés, 12 rolamentos.
Um motor DC consiste em uma parte fixa chamada indutor e uma parte móvel chamada âncora. Dependendo do projeto, os ímãs permanentes podem ser localizados no indutor, o que simplifica o projeto, mas não permite ajustar o fluxo magnético do motor, afetando sua velocidade.
Pelo método de criação de um campo magnético em movimento, os motores CC são divididos em:
-
válvula (sem escova)
-
colecionador.
Os motores sem escova possuem inversores eletrônicos em seu projeto, que realizam comutação de fase. Os motores coletores são tradicionalmente equipados unidades de coletor de escova, que são projetados para sincronizar puramente mecanicamente a potência dos enrolamentos do motor com a rotação de suas partes móveis.
Excitação de motores coletores

De acordo com o método de excitação, os motores coletores são dos seguintes tipos: com excitação independente de ímãs permanentes ou eletroímãs, ou com auto-excitação. Os motores de excitação por ímã permanente contêm ímãs no rotor.Os motores auto-excitados possuem um enrolamento de âncora especial no rotor, que pode ser conectado em paralelo, em série ou misturado com um enrolamento de excitação especial.
Motor de ondulação
Um motor de corrente pulsada é semelhante a um motor CC. A diferença está na presença de pastilhas revestidas no núcleo, além de postes revestidos adicionais. Além disso, o motor de corrente de ondulação possui um enrolamento de compensação. Esses motores são usados em locomotivas elétricas, onde geralmente são acionadas corrente alternada retificada.
Motor CA
Os motores CA, como o nome indica, são alimentados por corrente alternada. Eles são síncronos e assíncronos.
Para motores CA síncronos, o campo magnético do estator se move na mesma velocidade angular do rotor, enquanto os motores assíncronos sempre apresentam um certo atraso (caracterizado pelo valor de escorregamento) - o campo magnético do estator em seu movimento parece estar à frente do rotor, que por sua vez é sempre procura alcançá-lo.
Motores síncronos de alta potência (centenas de quilowatts) possuem enrolamentos de campo no rotor. Os rotores de motores síncronos menos potentes são equipados com ímãs permanentes, que formam os pólos. Os motores de histerese também são, em princípio, síncronos.
Motores de passo - Esta é uma categoria especial de motores síncronos com controle de alta precisão da velocidade de rotação, até uma contagem discreta de passos.
Os motores a jato síncronos de válvulas são alimentados por um inversor.Veja este tópico:Motores a jato síncronos modernos

Os motores CA assíncronos são diferenciados pelo fato de que sua velocidade angular de rotação do rotor é sempre menor que a velocidade angular de rotação do campo magnético do estator. Motores de indução são fase monofásica (com enrolamento inicial), bifásico (um motor capacitor também se aplica a eles), trifásico e multifásico.
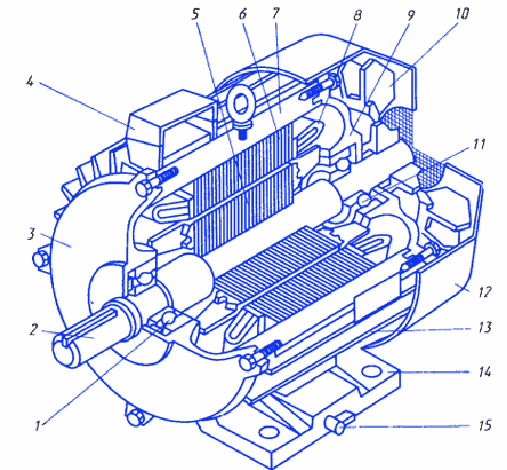
Projeto de motor de indução trifásico com gaiola de esquilo
Um motor elétrico assíncrono consiste em uma parte fixa (estator) e uma parte móvel (rotor), mantidas pelos rolamentos 1 e 11 instalados nas tampas laterais 3 e 9. O rotor consiste em um eixo 2, no qual um circuito magnético 5 com um enrolamento é fixo. O estator do motor consiste em um alojamento 7, ao qual está conectado um circuito magnético 6. Um enrolamento trifásico é colocado nas ranhuras do circuito magnético 8. A tampa da caixa de terminais 4 e a tampa protetora do impulsor 12 também estão conectadas ao alojamento.
O rotor de fase possui um enrolamento trifásico, feito pelo tipo de enrolamento do estator. Algumas extremidades das bobinas estão conectadas ao ponto zero (“estrela”), enquanto outras estão conectadas aos anéis coletores. As escovas são impostas aos anéis, fazendo contato deslizante com o enrolamento do rotor. Com esse projeto, é possível conectar um reostato de partida ou de ajuste ao enrolamento do rotor, o que permite alterar a resistência elétrica no circuito do rotor.
Veja também - Diferenças entre motores de indução e motores de corrente contínua, Diferenças entre motores de indução com gaiola de esquilo e com bloqueio de fase
Um motor assíncrono com um conversor de frequência para controlar sem problemas a velocidade de rotação do eixo, alterando a frequência e a tensão de alimentação:

Motores de escova universais
O mecanismo coletor universal pode operar pelo menos direto, mesmo a corrente alternada (50 Hz). Tem excitação serial, é usado em eletrodomésticosonde é necessária uma velocidade de rotação maior que a máxima para motores CA convencionais de 3000 rpm. Como regra, a potência desses motores não excede 200 watts. Atende controle de tiristor velocidade universal do motor.
Uma versão aprimorada do motor universal é um motor síncrono com um sensor de posição do rotor, em que o papel do coletor é desempenhado por um inversor eletrônico.
Outros artigos úteis sobre esse tópico:
Tipos de motores elétricos e os princípios de seu trabalho
Características dos motores de indução
Como determinar a velocidade de rotação de um motor elétrico
Como verificar o motor elétrico
Como desmontar um motor de indução
Tipos e disposição das rotações da velocidade do motor coletor
Veja também em electro-pt.tomathouse.com
: